I was fortunate to participate in very good projects during my senior year. One an independent project to design and build a walking robot for the SAE Walking Machine competition. The senior group project developed in conjunction with the NC Industrial Extension service was to design a build a portable, human powered means of dumping 400 lb over the top of a typical dumpster.
I learned some good lessons about collaborating in groups. In both cases we were successful producing functional deigns.
I learned some good lessons about collaborating in groups. In both cases we were successful producing functional deigns.

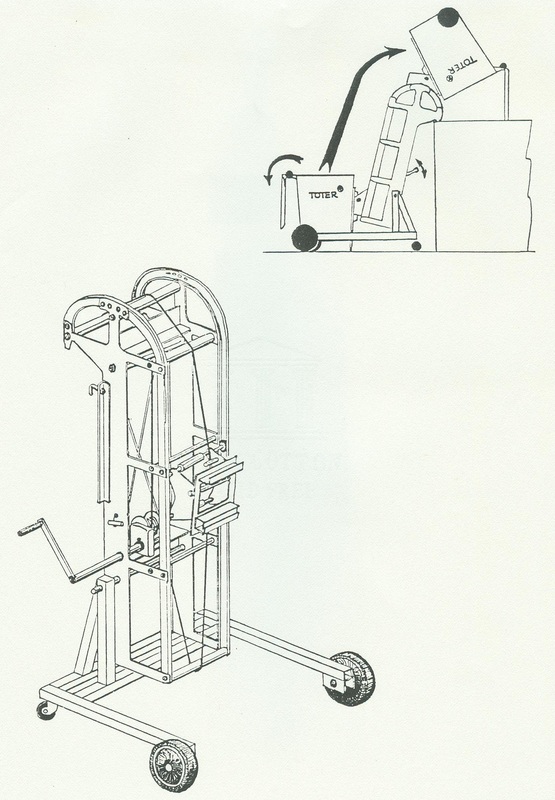
Toter dumper project (senior design class):
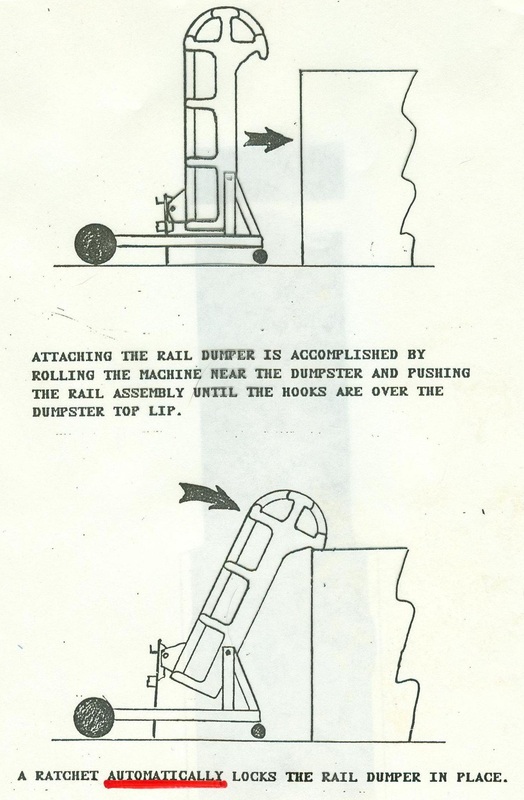
Goal: Dump 400 lb of wet newspaper over the top and into a dumpster.
The constraints were:
Goal: Dump 400 lb of wet newspaper over the top and into a dumpster.
The constraints were:
- spend less than $300
- use no electric or other non-human power power
- the user would be untrained.

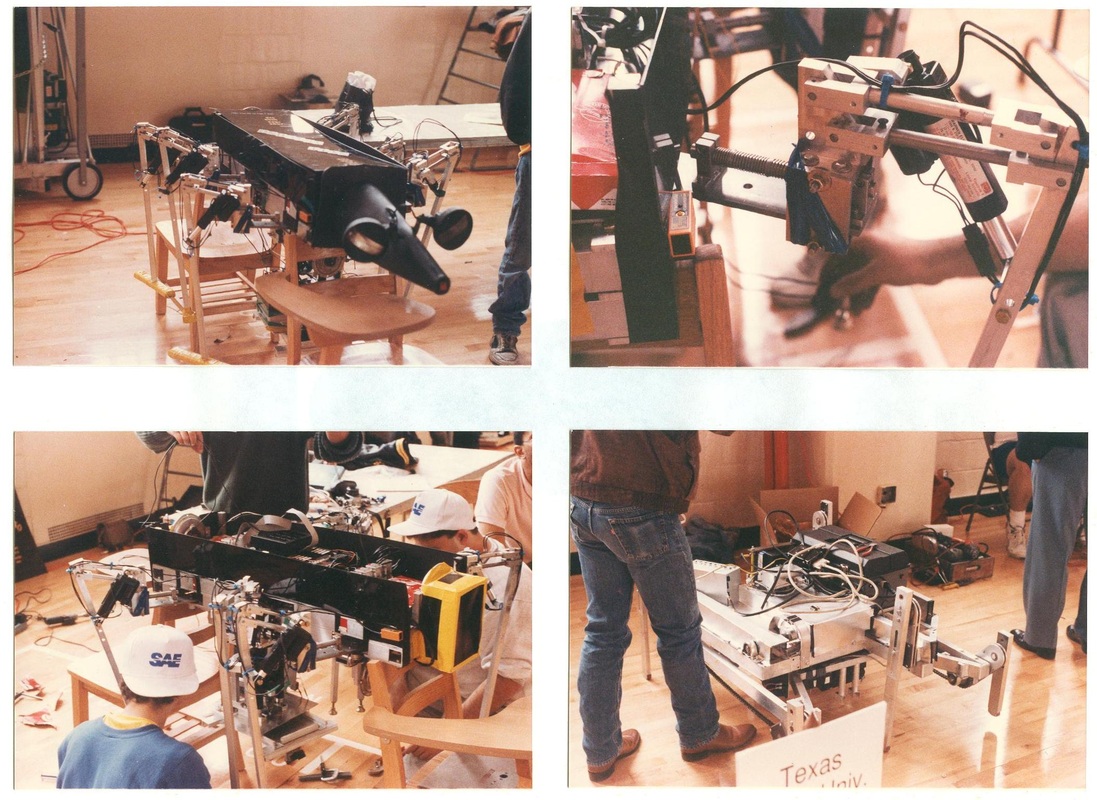
Walking Robot for SAE national Walking Machine competition:
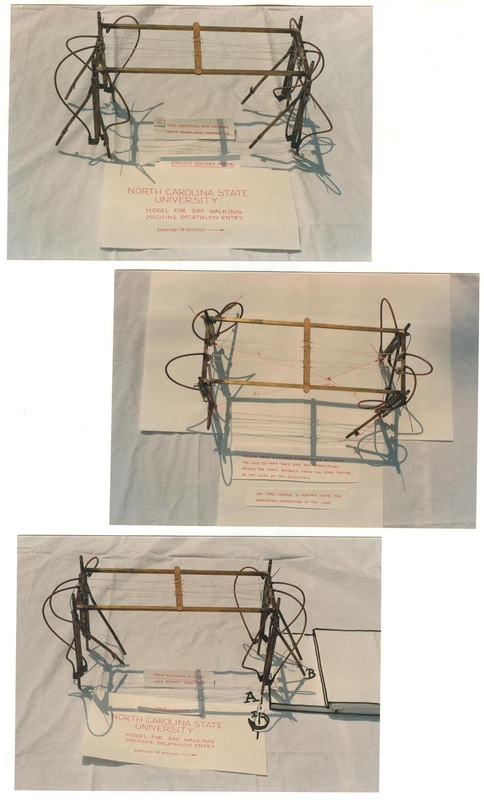
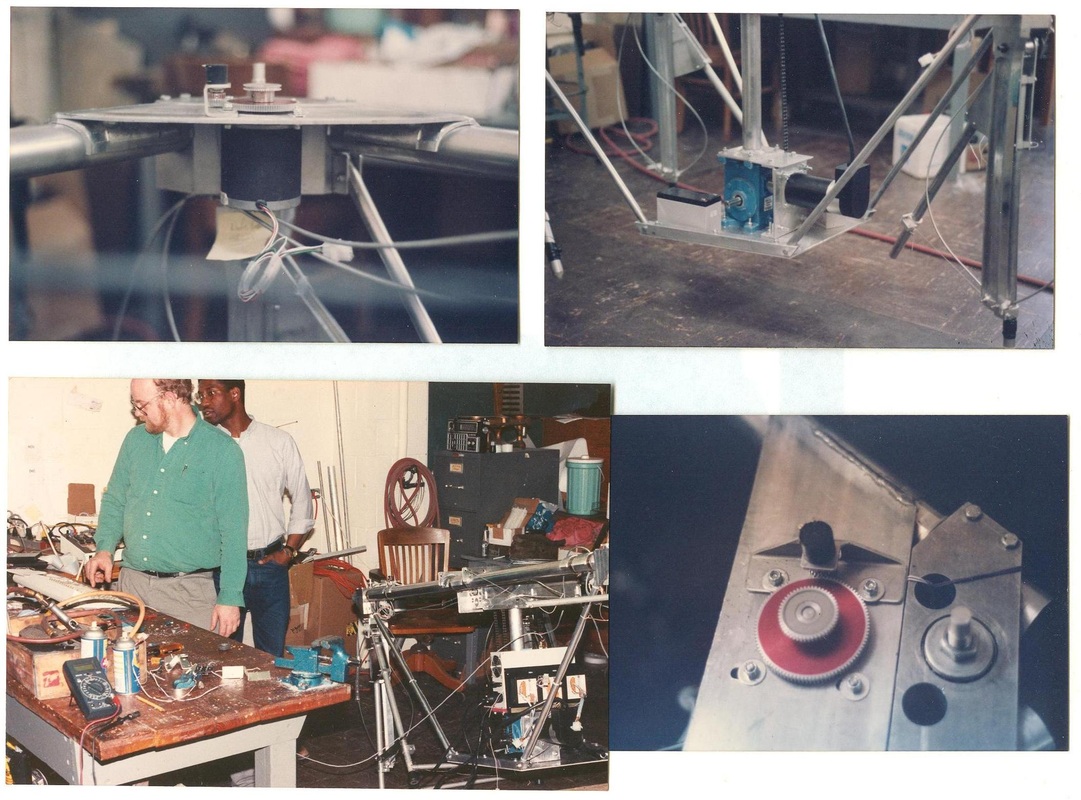
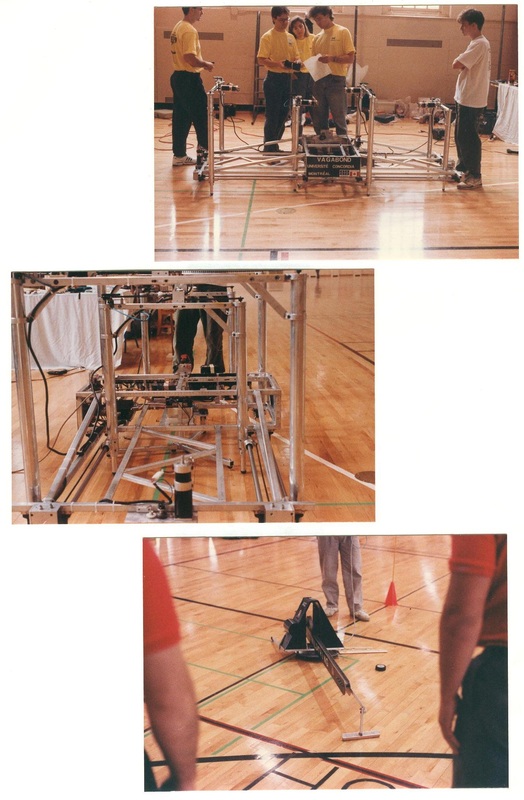
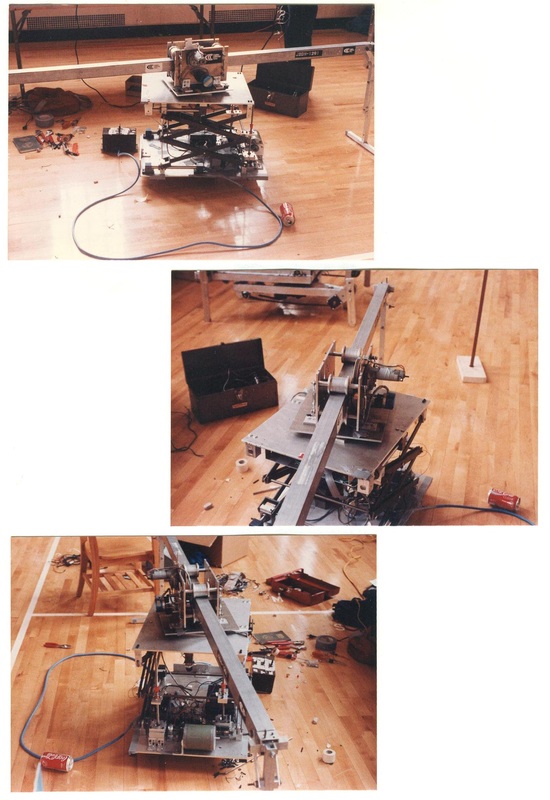
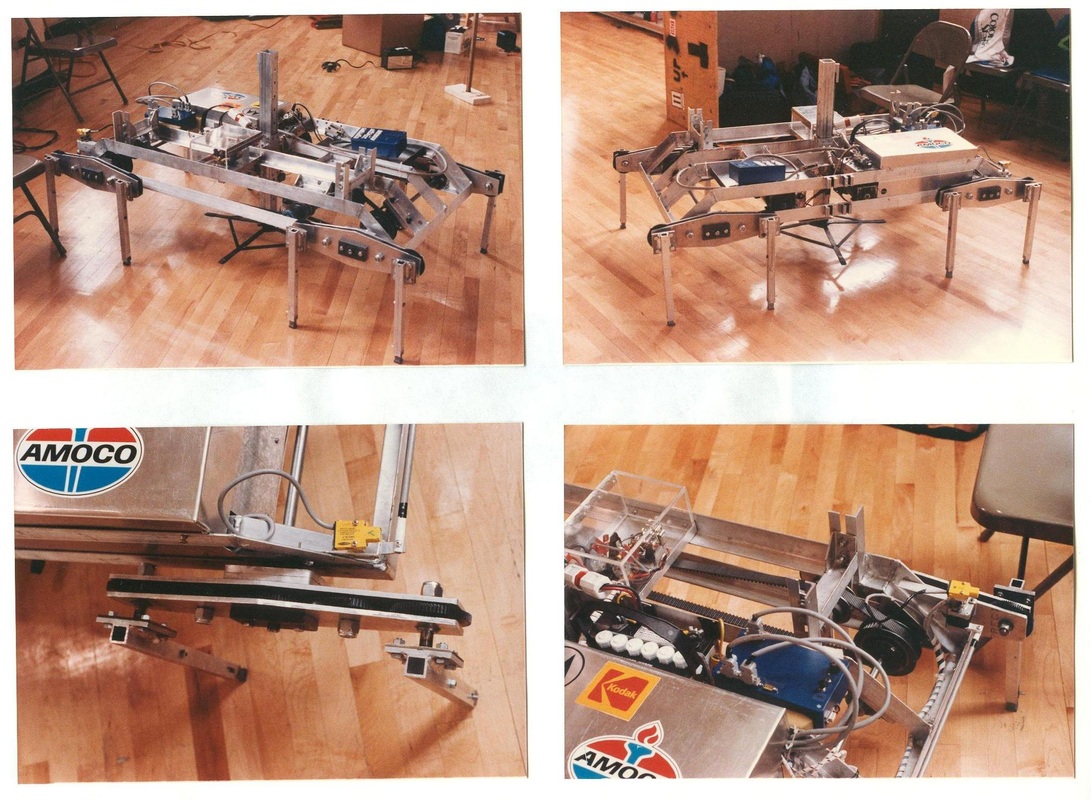
In our senior year at NCSU six of us formed a team to compete in the SAE Walking Machine competition. I missed out on the preliminary sessions where the type of walking motion was selected, but when I came on I built a model (see below) to demonstrate one way we could implement it - a motion similar to how one uses dividers or calipers to measure distance on an engineering drawing - one leg touches the ground, it is swung in the desired direction of motion and the V-shaped leg is rocked over and the other point takes the weight. It is a swing, rock, swing, rock, swing... motion.
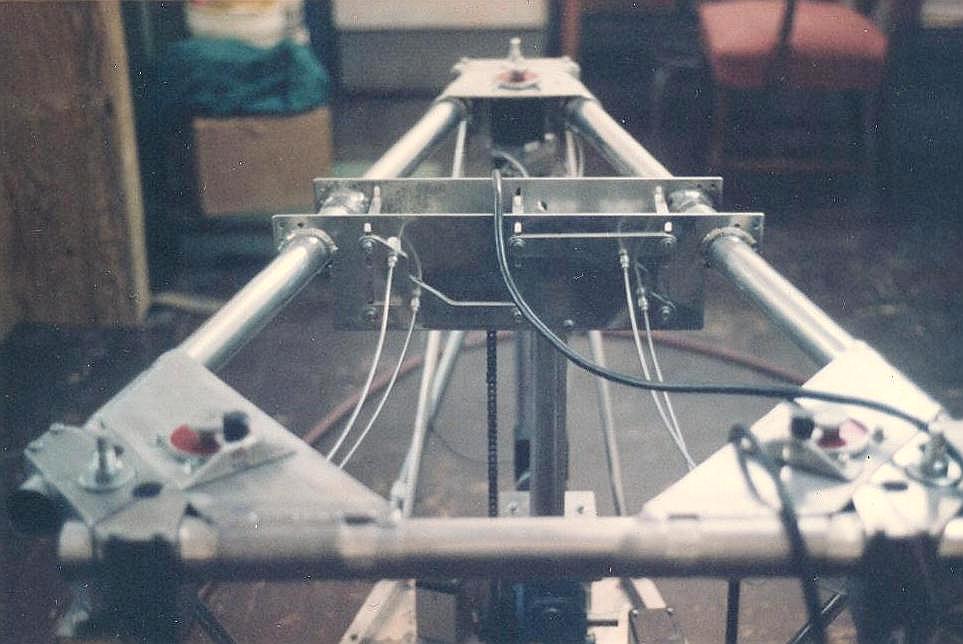
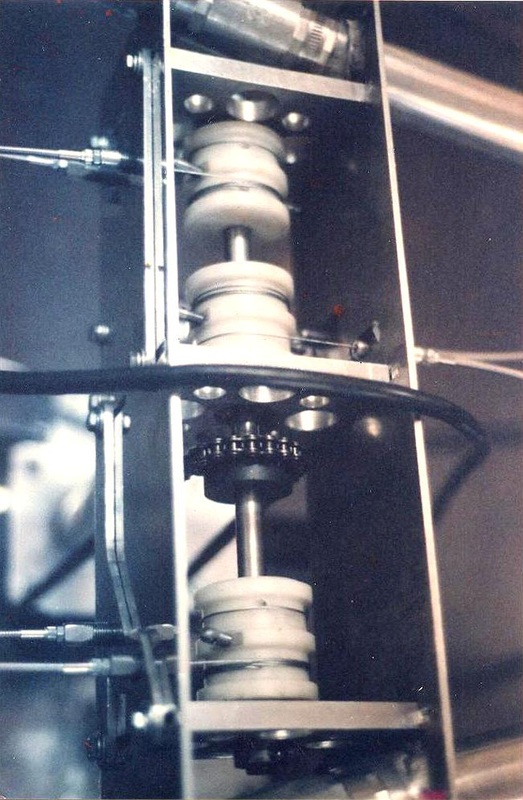
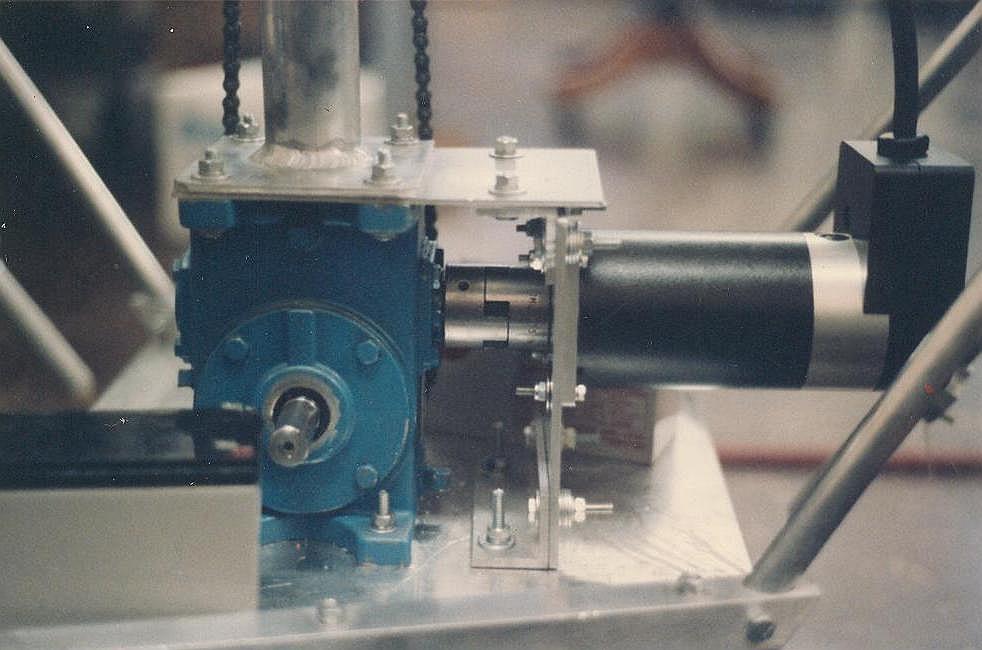
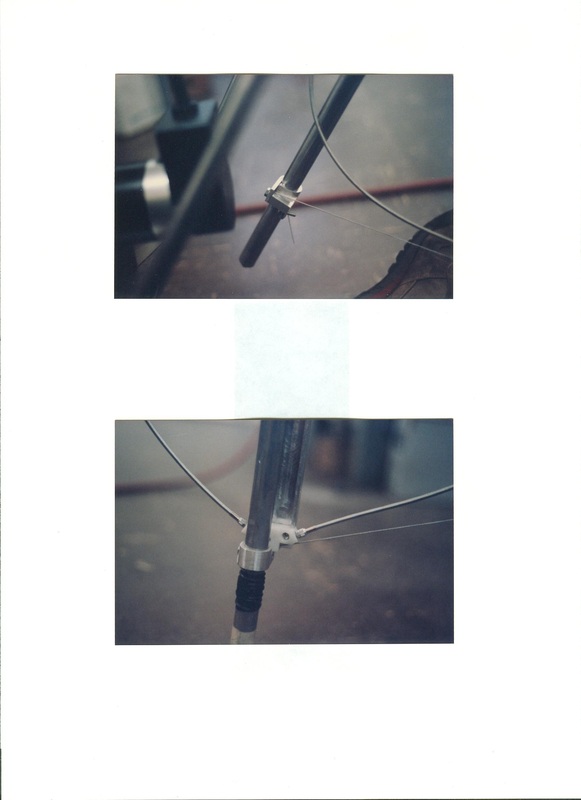
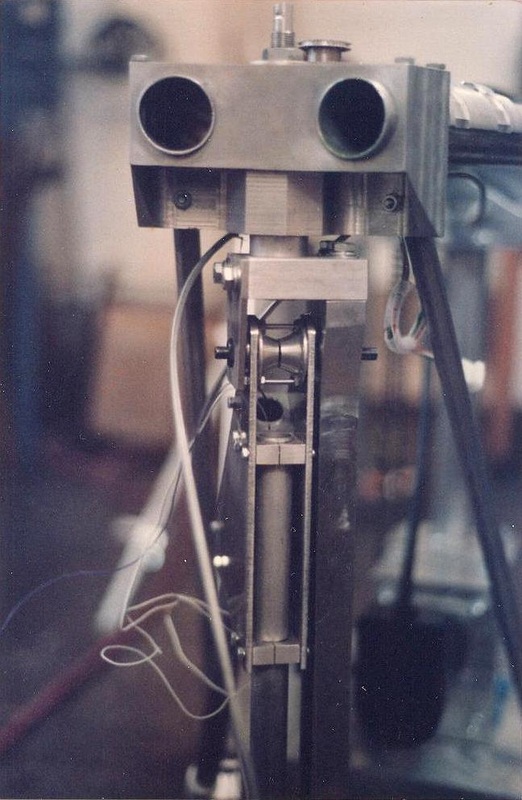
My part to design and build was the servo, winch, cables, and frame. We all worked together machining the parts (except the angled holes in the corner blocks, which we hired out).
In our senior year at NCSU six of us formed a team to compete in the SAE Walking Machine competition. I missed out on the preliminary sessions where the type of walking motion was selected, but when I came on I built a model (see below) to demonstrate one way we could implement it - a motion similar to how one uses dividers or calipers to measure distance on an engineering drawing - one leg touches the ground, it is swung in the desired direction of motion and the V-shaped leg is rocked over and the other point takes the weight. It is a swing, rock, swing, rock, swing... motion.
My part to design and build was the servo, winch, cables, and frame. We all worked together machining the parts (except the angled holes in the corner blocks, which we hired out).